
通过准同质弹性体网格的模量调控构筑全向抗应变干扰的触觉阵列
发布时间:2023-12-06
类皮肤可拉伸触觉阵列对于感知柔软/可变形表面的物理交互具有重要意义,然而,机械应变诱导的干扰总是不可避免地降低触觉阵列的压力感知精度。刚性岛结构可拉伸电子器件为抗应变干扰触觉阵列的构筑提供了有效的策略,但是,刚性岛与可拉伸基底通常为异质材料组合,存在大的机械失配与低的界面黏附,在过度与重复拉伸下,结合区域往往会发生分层与开裂,并由此引发器件失效。
本工作提出通过准同质弹性体网格的模量调控构筑全向抗应变干扰的触觉阵列,其中,准同质的岛状敏感层与可拉伸基底在热压工艺下形成强韧的界面结合,可以承受界面面内应变差产生的较大剪切应力,从而避免过度或重复拉伸下结合区域的分层与开裂。此外,在拉伸过程中,由于纤维取向的设计而产生的较大模量差会使准同质弹性体网格形成图案化的应变分布,通过局部加强与可控变形,消除拉伸应变对敏感区域的影响
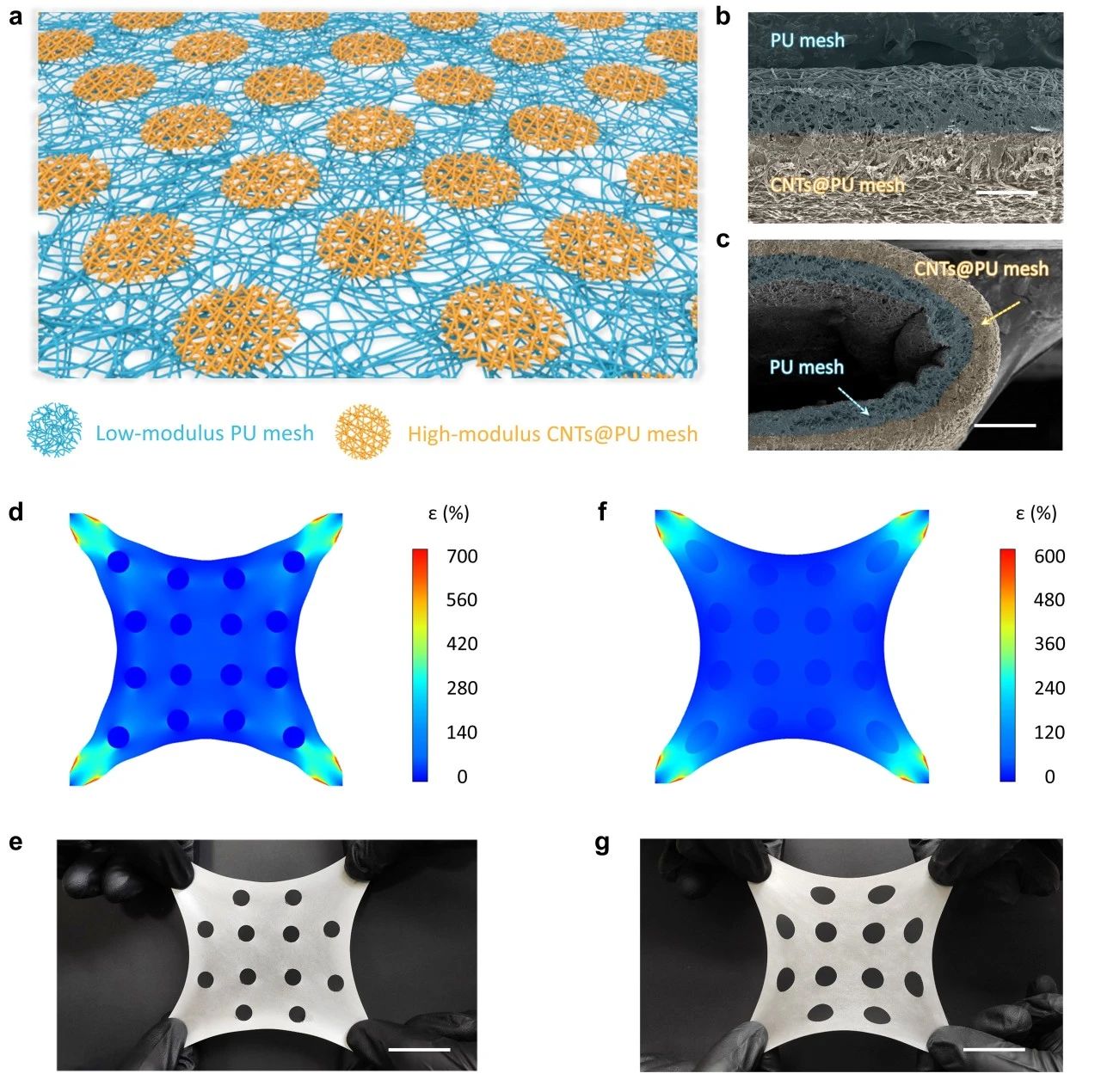
图1 图案化应变分布准同质弹性体网格的设计
当纤维取向与拉伸方向一致时,弹性体网格在拉伸过程中的本征弹性变形占主导,材料表现为高的拉伸模量;当纤维取向垂直于拉伸方向时,弹性体网格在拉伸过程中结构变形占主导,材料表现为较低的拉伸模量。通过改变纤维取向结构,可以有效调控弹性体网格中本征弹性变形与结构变形的占比,进而获得可定制化的拉伸模量与延伸率。其中,拉伸模量的调控范围为0.23-8.23 MPa,延伸率的调控范围为400-1300%。
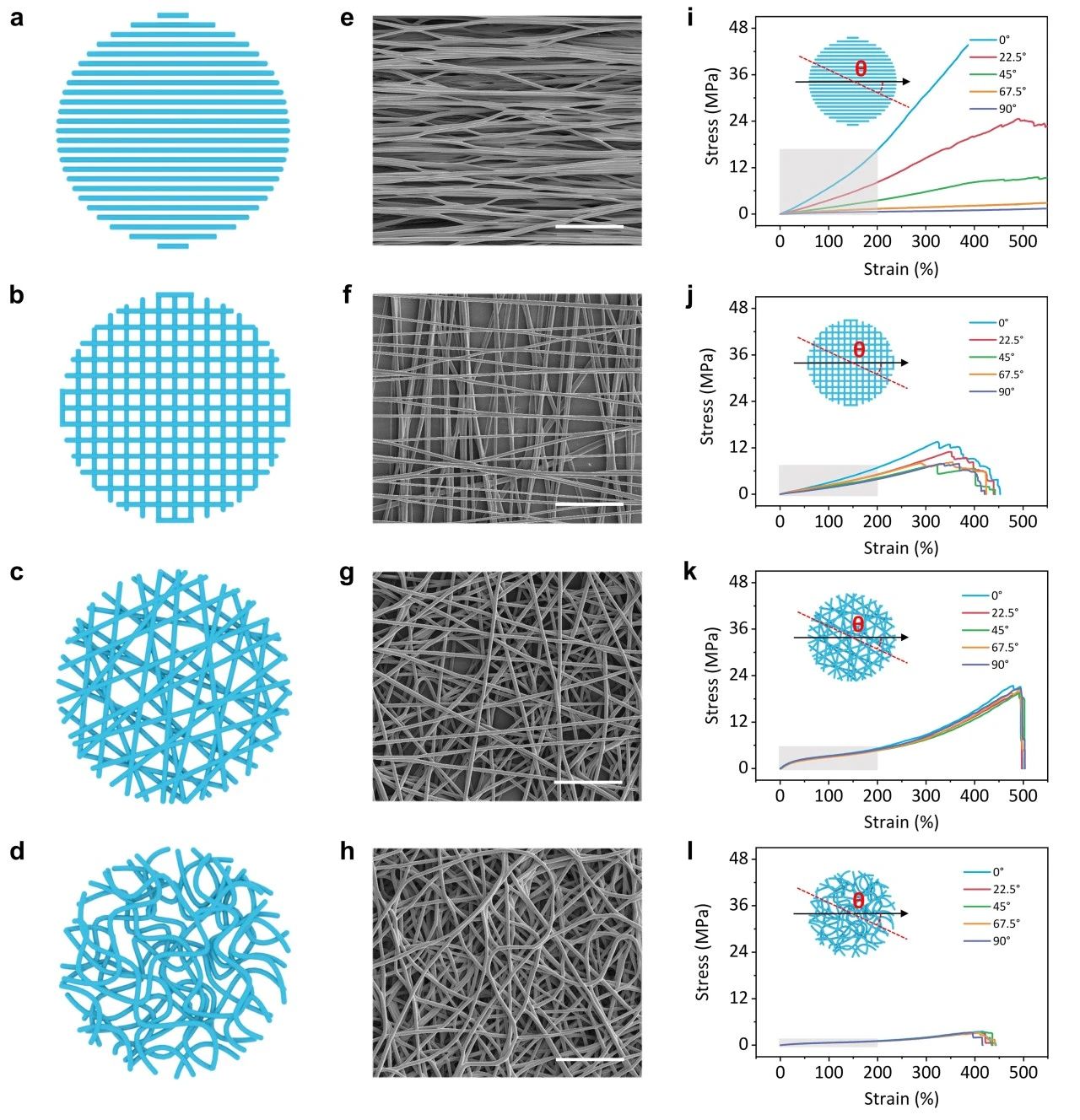
图2 通过纤维取向结构设计调控准同质弹性体网格的模
设计构筑了全向抗应变干扰的触觉阵列,沿平面内任意方向拉伸100%的应变量时,敏感区域电极电阻与接触电阻的波动均小于3%,触觉阵列仅选择性响应法向压力。
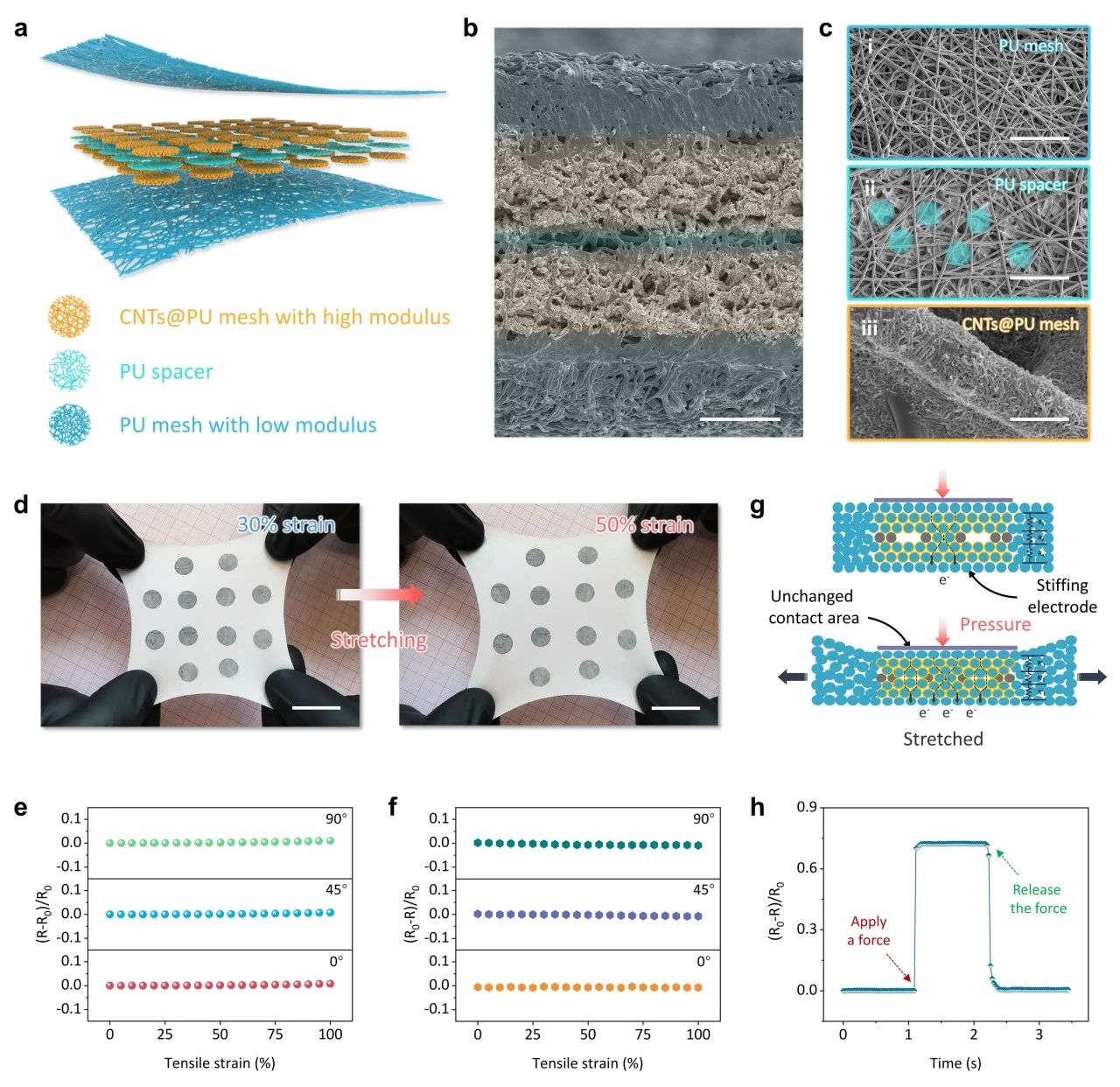
图3 全向抗应变干扰触觉阵列的设计与构筑
全向抗应变干扰触觉阵列沿平面任意方向拉伸至100%时,其应变非敏感度大于97%。在应变工作范围、压力探测范围与应变非敏感度3个核心性能指标上都具有显著优势。此外,传感阵列在经历了10000次循环拉伸与按压后,其传感性能并未发生明显波动。
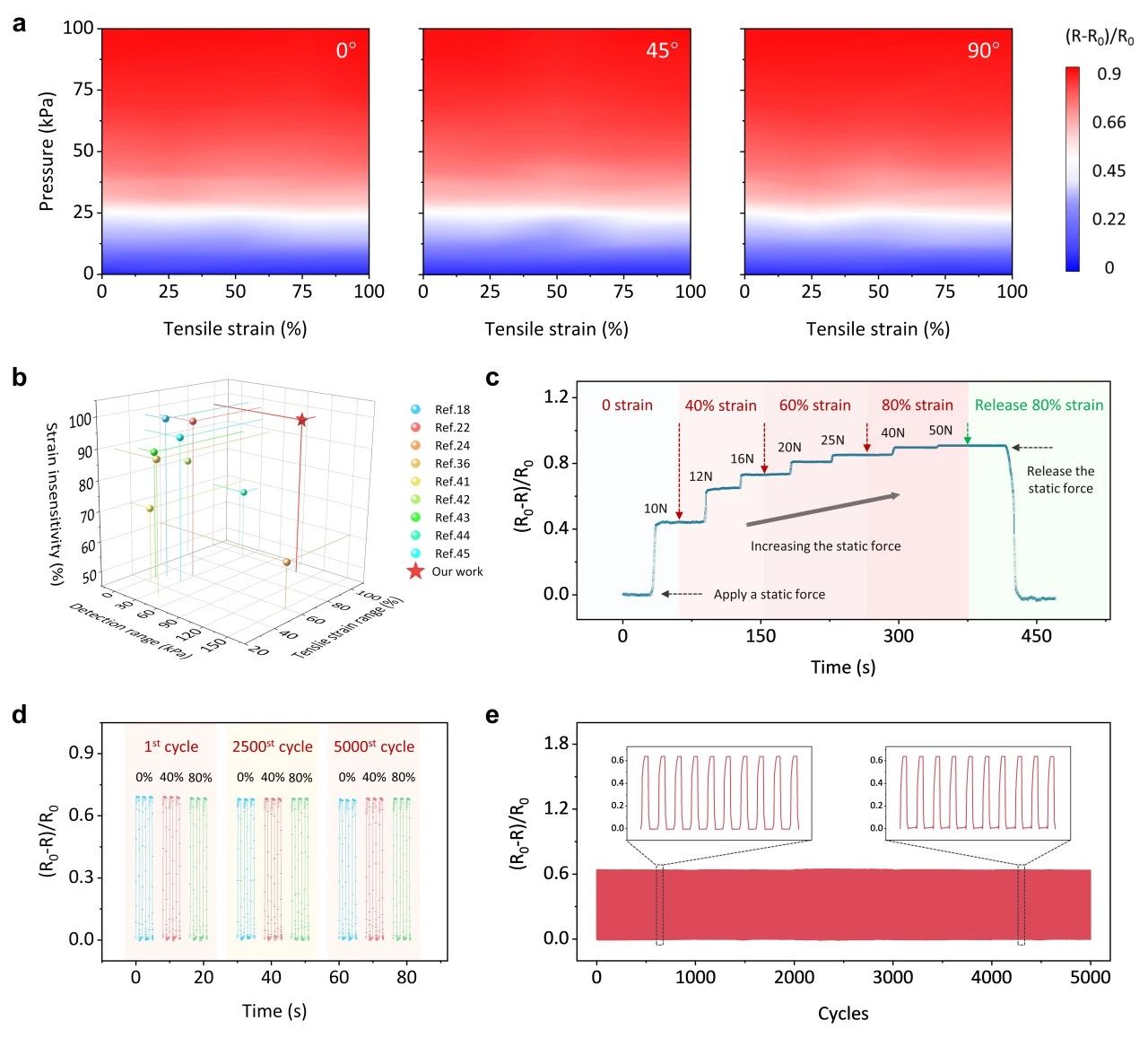
图4 全向抗应变干扰触觉阵列的传感性能
将触觉阵列与软硬件集成,构筑了触觉可视化系统,实现了在多轴拉伸状态下触摸刺激的实时可视化。同时,触觉阵列还实现了关节运动过程中外力刺激、脉搏波信号的精准探测。
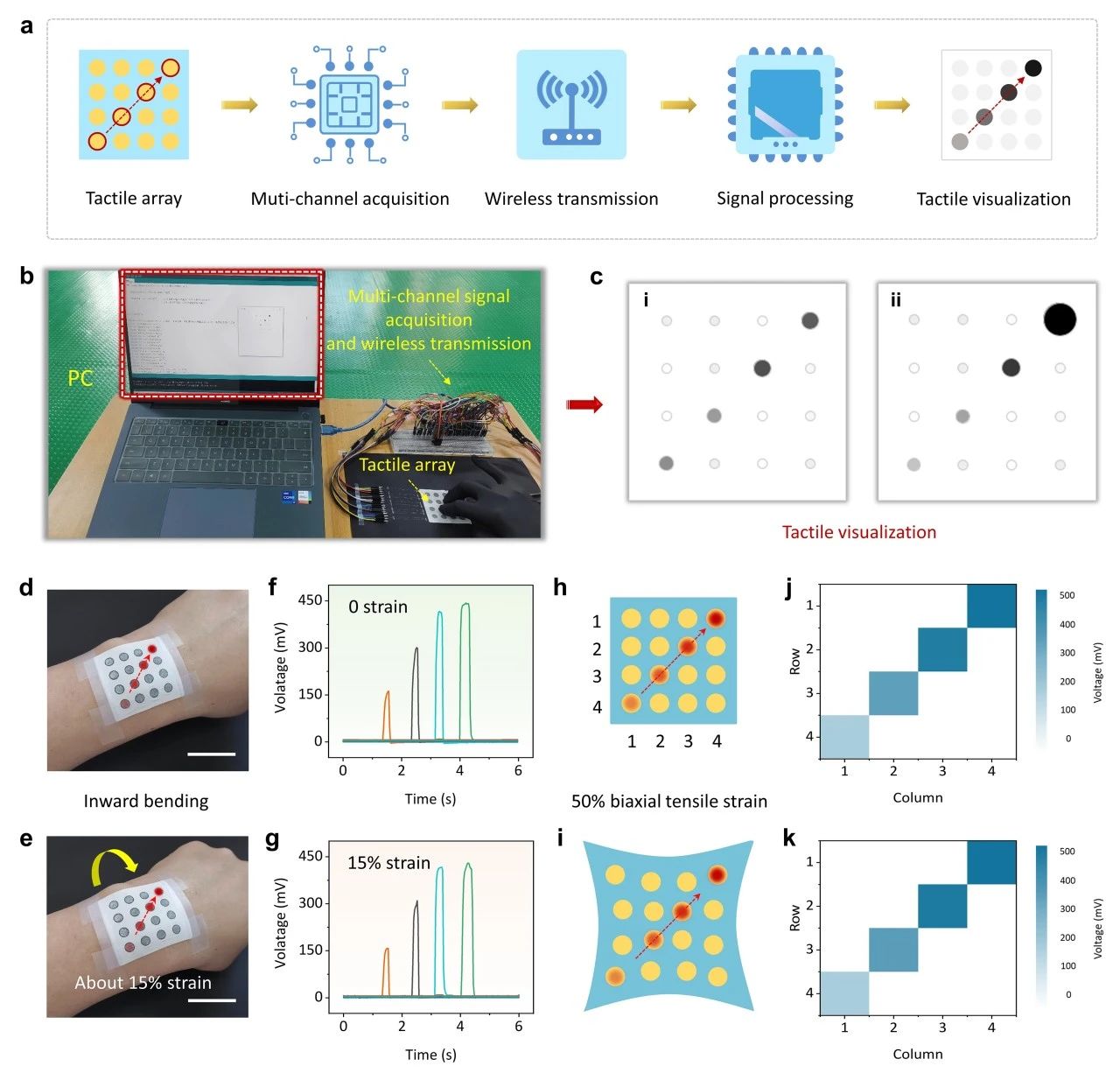
图5 全向抗应变干扰触觉阵列的应用
Omnidirectionally Strain-Unperturbed Tactile Array from Modulus Regulation in Quasi-Homogeneous Elastomer Meshes
Liangxu Xu, Xuan Zhao*, Xiaochen Xun, Fangfang Gao, Lusen Gao, Shuxin Bi, Liubing Fan,Shuchang Zhao, Qingliang Liao*, Yue Zhang*
DOI: 10.1002/adfm.202307475
原文链接: https://onlinelibrary.wiley.com/doi/10.1002/adfm.202307475

